2016 SIGSPATIAL Knowledge-Based Trajectory Completion from Sparse GPS Samples
Li Y, Li Y, Gunopulos D, et al. Knowledge-based trajectory completion from sparse GPS samples[C]//Proceedings of the 24th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems. ACM, 2016: 33.
作者是斯坦福大学与雅典大学的。
论文下载地址:http://pan.baidu.com/s/1dFMJPyL
主要内容:
这篇文章主要介绍了不借助路网进行轨迹填充。算法主要分成三步:刻画路网框架(b图)、构建路网图(c图)、完成轨迹填充(d图)
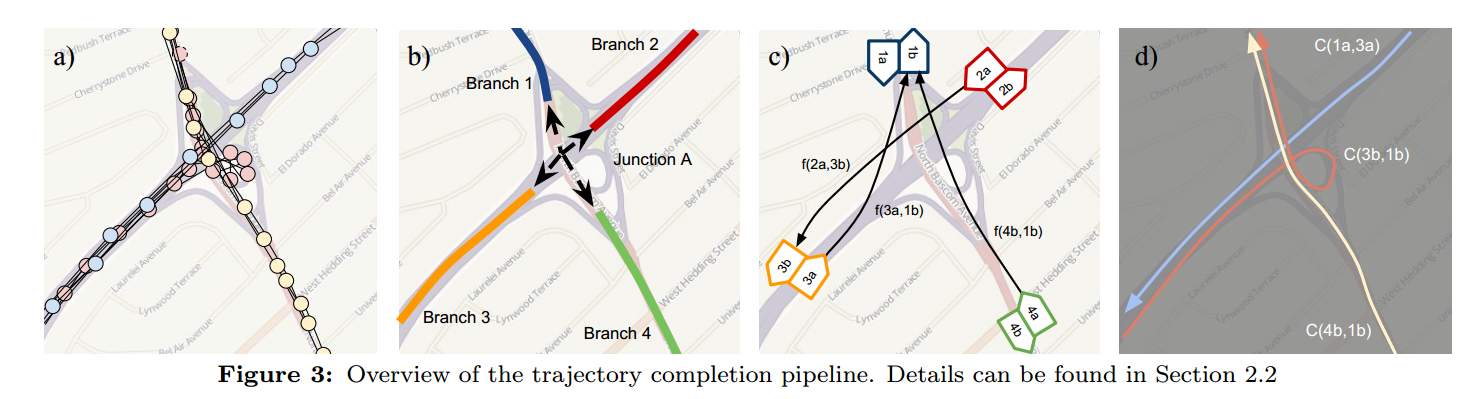
刻画路网框架:
应用L1-medial框架抽取算法,利用GPS点描绘出路网的基本框架,但不包括交点处,称为框架分支。作者认为交点处使用L1-medial算法不可靠,需要更进一步分析。
L1-medial算法来自于这篇论文:Huang H, Wu S, Cohen-Or D, et al. L1-medial skeleton of point cloud[J]. ACM Trans. Graph., 2013, 32(4): 65:1-65:8. 主要是通过找到一些曲线来刻画整个点集的分布。
与L1-medial不同的是,由于轨迹数目可能非常多,不可能利用所有的轨迹数目来计算,因此需要采用随机采样的方法,这样可能造成一个问题:采样不均匀,因为稀疏轨迹点分布式不均匀的。针对这个问题,作者题出了一种采样策略,首先利用插值的方法将轨迹点转化成灰度图。
构建路网图:
路网框架不能描述不同路网分支之间的流向,因此需要进一步完善。通过不同框架分支的车流量分析,构建出路网图,称为连接网络。
轨迹填充
轨迹填充是利用构建的路网图以及历史轨迹,对每一条轨迹进行还原。插入的轨迹点是从其他轨迹中“借”来的。
总结:
这篇文章没有怎么看懂,有很多细节的地方不大明白。但是可以借鉴的是,他采用图形学的办法进行路网构建,这对于没有路网数据的情况下轨迹的Map-Matching非常有用。例如,自行车的Map-Matching就可以用到类似的方法。
0 条评论